有限元计算原理
4. 桁架结构
4.1 2D问题中的结构分析

有必要声明一下已经定义的值:全局坐标(X,Y); local坐标(x,y);全局坐标下的力和位移。
一个二力杆只能受沿杆方向的力。

在local坐标下:

4.1.1 坐标变换




写成矩阵形式:

矩阵A比较特殊————

4.1.2 单元刚度
在1D问题中单元刚度等式为

拓展到2D空间【y方向的力都是0】:

写成矩阵形式:

利用坐标变换表达出全局坐标下的单元矩阵:

全局坐标下的等式:


4.2 求出指定点的位移

4.2.1 点3处固定【杆3不存在】
以杆1为例:写出它的单元刚度矩阵:

变换为全局坐标:

杆2解法同上,但是多一条坐标变换。

连接矩阵:

组合起两个全局刚度矩阵:

边界条件:

点2上的力:

求得点2的位移:

4.2.2 点3处只能上下滑动【杆3存在】
这种情况比4.2.1多一个杆3。
连接矩阵:

组合起全局刚度矩阵:

边界条件:

负载条件:

求得点2,点3的位移:

5. 线弹性【广义胡克定律的二三事】
在x方向施加非0压力:

3个方向:

剪切应力:

各向同性材料的3D胡克定律:

回忆到这个关系式:

求得刚度矩阵:

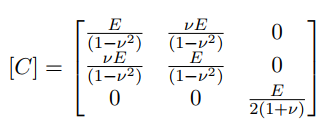
6. 2D平面应力

消除3D矩阵中为0的行列,得到塑性矩阵:

求逆得刚度矩阵:

注意到两切应力=0:

3D应力状态:

求逆得塑性矩阵:

7. 线性三角微元

通过插值得到位移场:

简化形式写成:

[N]为(2X6)矩阵; {de}为(6X1)向量。
线性函数们:

简写形式:

以N1为例:

得到

求得

A是微元的面积:

代入得到N1:

同理可得N2、N3:


8. 力-位移 矩阵




9. 高斯积分


10. 应变能



![V 7 keepalived+[nginx,haproxy]](http://s5.51cto.com/wyfs02/M00/79/65/wKiom1aPvqXTb1hWAACP4Rj-wko807.jpg)


